This last Tuesday Leonardo and I present at the 2016 ASES conference in San Francisco. The conference we an absolutely amazing experience for myself and I plan on attending another as soon as possible. During the last conference a lot of networking was done. The first companies we contacted were those on the bottom floor. Meyer Burger was a cell production company that are optimizing photovoltaic cell for solar panels. Neo Solar Power were one of the next companies we talked too. Neo Solar has 355W panels that were relatively similar in data as the Sun Edison panels we were considering for our calculations. Hyundai Solar Modules also caught our attention however there panels have a relatively low voltage and low wattage for our applications as well as a lower module efficiency. Smartflower POP is definitely something i'm interested in, it has an effective opening and closing design as well as a beautiful aesthetics to it. One very interesting maintenance possibility that was using the RMUS Solar Inspector Pro which is essentially a quad-copter designed to maintain and support a solar pane system. ECOLUX and LOSERChemie have developed great methods for simple PV recycling. PFalz Solar was a company that was mass selling to city grid systems, something we may be able to replicate in our applications. Tectonic was a support company that is wanting to assist us in electrical installations, generation calculations, and similar calculation that SAMs does for us currently. Similar to tectonic, Greenlancer has a support system for our entire installations and manufacturing. As for batteries, there were more batteries companies than solar panel companies in my opinion. Some companies we looked at were Fullriver AGM battery, Herewin storage, an electrIQ which has an AC/DC inverter as well., SIMPLIPHI smart-tech battery, and BMZ energy storage to name just a few.. One company I think we may want to implement is NHR, a regenerative grid simulator company. There simulations machines are around 30,000 so that may be an impinging factor to our decision to use the simulation. Lastly we got information on all the electronic components from QuickCables and "blind" connectors form CombiTac. After the networking session we had our presentation in which we went over all of our calculations, designs, and future ideas we have of the transit system. All in all it was a very memorable opportunity for me.
Thursday, July 14, 2016
Friday, July 1, 2016
This week I was working on the racking system for the solar
panels. I designed a track like the picture below. The track on the left is designed to be
installed on a different area than the one on the right.


There are two track for the solar panels rack.
One of the tracks will be on the far right or far left of the rail and the other
track will be connected to the support beams that hold up the rails. I designed
one track to utilize the ribs on top of the railing as support and the other
one to utilize the support beams. Each track will use the same “CAM LOCK”
mechanism that is essentially a 90 degree lock and opening mechanism As Shown
Below. On the track connecting the support beams; there will be three of these
Cam Lock that connect to a support plate on each of the support beam .


For the support best track, there will be a connecting
mechanism that slides inside of each support beams, and becomes drilled into
the support beam. The connecting mechanism allows the cam lock to tighten the support
beam plate as shown below.

I am now working on a gearing
mechanism that allows a robot to turn the central Cam lock on the support plate
and results in turning the two exterior cam locks; reason for this is to make
labor close to non.
Friday, June 24, 2016
 
Below is the consumption of Vehicles for test track. The only variables changed was considering 1 vehicle, 150 meters inbetween stops
|
|||
|
| |||
|
|
|
||
|
6.46103575E+05
|
J/Car
|
||
|
1.60E+04
|
W/Car
|
||
|
1.60E+01
|
Kw/Car
|
||
|
3.82876E+02
|
Kwh Per Day
|
||
|
1.39750E+05
|
Kwh Per Year
|
||
|
Flex-02
350W
|
Symbol
|
Performance
|
|
Nominal Power
|
W
|
350
|
|
Efficiency
|
%
|
13.6559
|
|
Maximum Power Current
|
A
|
11.33
|
|
Open Circuit
Voltage
|
V
|
38.8
|
|
Maximum System Voltage
|
V
|
1000/600
|
|
Area
|
m2
|
2.572
|
|
Weight
|
Kg
|
2.4
|
2300m^2-2800m^2


{kind=link}

Below is the cost analysis to satisfy this track (accounting for the Miasole panels) and considering different orientations with their specific optimizations. The Helios activator was assumed when calculating the cost and energy consumption of tracking systems.


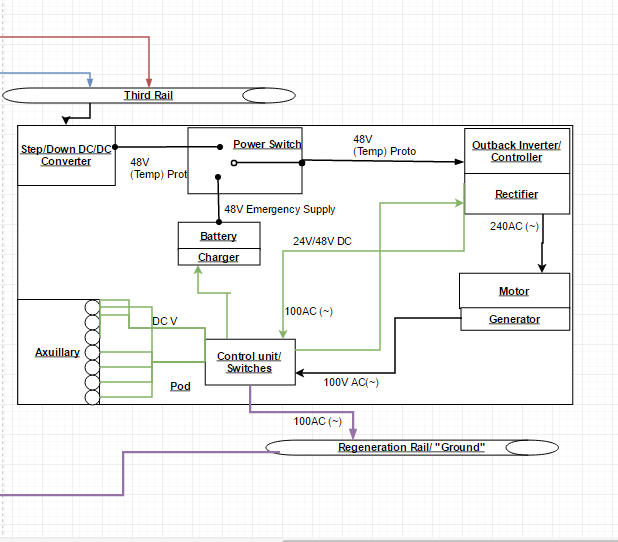
The basic electrical diagram assumes a solar panel
array of 1400 DC voltage which inverts (with the same phase as the grid) to an
1100 AC loading voltage. The 1100 AC loading voltage is then forced through a
control switch and a series of sub-switches depending on where the voltage is
needed in the system. If pods are not consuming all the supplied power, then
the 1100 AC voltage will lead to a step-up transformer to charge the grid
system. If significant power is being drawn by the pods, then the loading
voltage is switched to the Converter/Substation and the 1100 AC voltage
converts to a 750 DC voltage. During non-sunlight hours the Grid will unload
and the assumed 12,000V AC will step-down to an 1100V AC. The outback charger
forces the 1100AC V unloading from the Grid to have the same phase as the
inverter. The 1100 AC voltage unloading is then switched into the
Converter/Substation the same way it would switch when being loaded by the
solar array.

When
the Converter/Substation receives an 1100AC voltage (from the Grid or Solar
Array) it outputs 750 DC voltage directly into the Third Rail of our system.
The third rail is in turn connected to a step-down DC to DC converter. Assuming
that we use an AC motor the converter will be connected to an inverter and the
48DC voltage supplied from the converter will by inverted into a 240AC voltage
that directly powers our motor. The regenerative braking system (motor-generator)
will go into a control unit which will determine where the voltage is needed.
In the case pod components need to be charged, the 100 AC (assumed) voltage
from the motor-generator will go into a rectifier that will convert the 100 AC
voltage into a 12-48V depending on which component needs to be powered. In the
case the Gird and the Solar panels fail, there is a backup emergency battery
that will power the motor; most likely, in this case, the regeneration energy
will go into power the battery. If all components are working optimally
(Battery and Auxiliary) than the control unit will allow the 100AC V to go into
the Regeneration Rail/ “Ground”. Unlike many Three or Four rail systems,
Spartan Superway designed its regeneration rail and ground rail to be the same,
utilizing energy that is lost. The Regeneration would lead into a step-up
transformer and charge our grid, completing the circuit of our system.
Friday, June 10, 2016
Solar Team 6/10/2016

Figure one shows the equation and calculations used to estimate the energy consumed of the vehicles in the superway. It is important to note that this equations takes into account that all the vehicles will be connected in the form of a train, meaning that the wind resistance and drag is not accounted for in every vehicle as it will be in reality. Figure 6 is the edited equation with wind and drag being accounted for in every vehicle.

Fig. 2 SAMS required conditions for annual energy consumption

Figure two shows the conditions required for our calculated annual energy consumption of 150 Vehicles. The conditions were calculated with a 340W Miasole thin Solar panel, and Exeltech XLGT18A60 Inverter (120V AC). With an estimated requirement of 6 Million kWh annually SAMS determines we will need approximately 12,500 panels with a total area of 32,189 m^2.

Figure 4 is the comparison in Wh/mile. GM EV1 approximated at 50mph and 24 miles that their electric vehicle with use 127watt-hours/mile. When we estimate one Superway pod traveling at 25mph at a distance of 24 miles we calculate 132.5 watt-hours/mile. This comparison allows us to validate that we are in the "ball park" of watt-hours/mile also giving our equation in figure one more credibility.

Figure 5 is the comparison in Wh/mile when we are considering the real distance between stops, which is 3500meters instead of 24 miles. We are considering a 20 meters elevation drop and rise before and after the distance in between stops. Taking into account the abundant acceleration and deceleration (because of the shorter distance in between stops) we calculate a total of 2114 Watt-hours/mile per vehicle. This emphasize the loss of energy form accelerations, deceleration and elevations in our track.

Fig. 6) Consumption of energy per vehicle taking into account wind resistance and drag for each vehicle.
Figure 6 is our estimations of how much energy would be consumed by our vehicles when we look at them as an individual pods instead of a one large train of pods. This of course adds more consumed energy by our vehicles, approximately increased by 1.62*10^5 J per 150 cars annually. SAMS estimates that we would need to add 3,000-4,000 solar panels to account for the extra wind resistance for each vehicle.

Figure 7 shows the energy leftover each day when was consume energy from the actuators and add optimization from the actuators. The estimation is done assuming the exact panels required to meet the energy consumption by our vehicles (accounting for air resistance) per day. As shown having actuators change twice a year or 4 times a year adds a significant energy production (leftover) per day. The 2-axis tracker does add more efficiency than the fixed panels however considering the energy consumed throughout the day from its tracker and actuator is actually will produce less leftover joules per day than the 2 season and 4 season actuator. The next step for this will to be estimate the costs of the actuators and trackers and determine if the cost is worth the leftover joules per day.
Subscribe to:
Comments (Atom)